battleBot();
battleBot();
MECHATRONICS
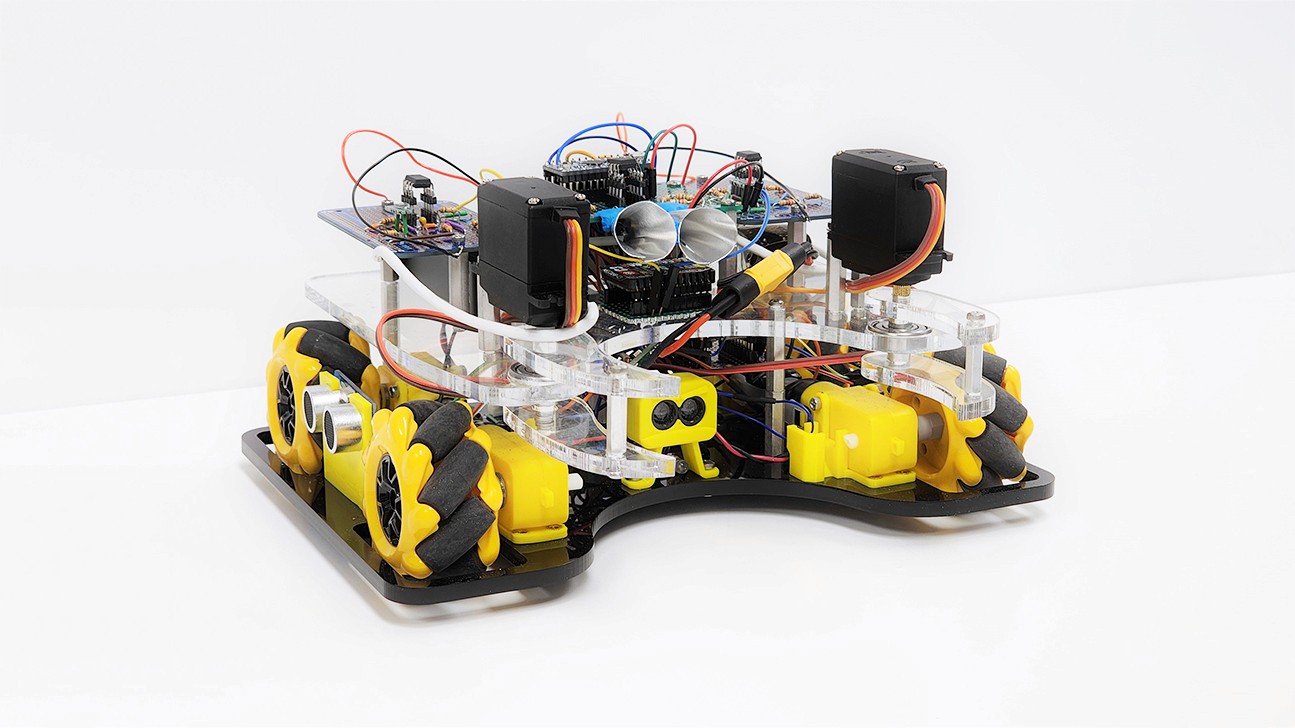
A semi-autonomous mecanum drive robot designed to play capture the flag. This was made for the infamous Penn Engineering class - Design Of Mechatronic Systems.
Anthony Saldutti – CAD, Chassis, Software
Drive, Beacon-tracking
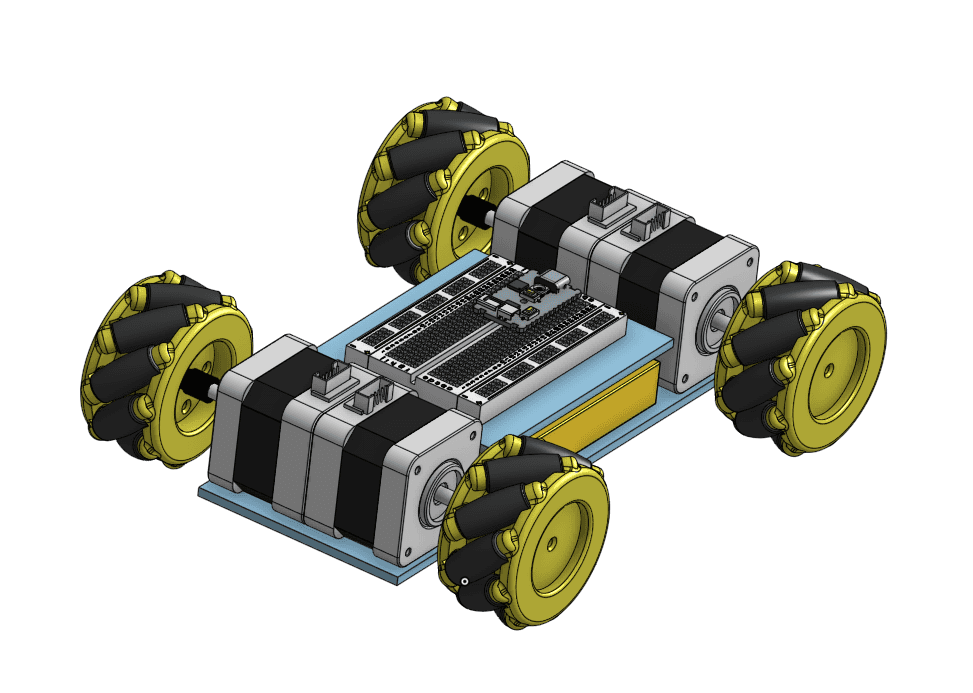
Chris Chong – CAD, Chassis, Drive
Wall-following
Sachin Pullil – Software, Vive localization
A semi-autonomous mecanum drive robot designed to play capture the flag. This was made for the infamous Penn Engineering class - Design Of Mechatronic Systems.
Anthony Saldutti – CAD, Chassis, Software
Drive, Beacon-tracking
Chris Chong – CAD, Chassis, Drive
Wall-following
Sachin Pullil – Software, Vive localization
A semi-autonomous mecanum drive robot designed to play capture the flag. This was made for the infamous Penn Engineering class - Design Of Mechatronic Systems.
Anthony Saldutti – CAD, Chassis, Software
Drive, Beacon-tracking
Chris Chong – CAD, Chassis, Drive
Wall-following
Sachin Pullil – Software, Vive localization
GRAND THEFT AUTONOMOUS
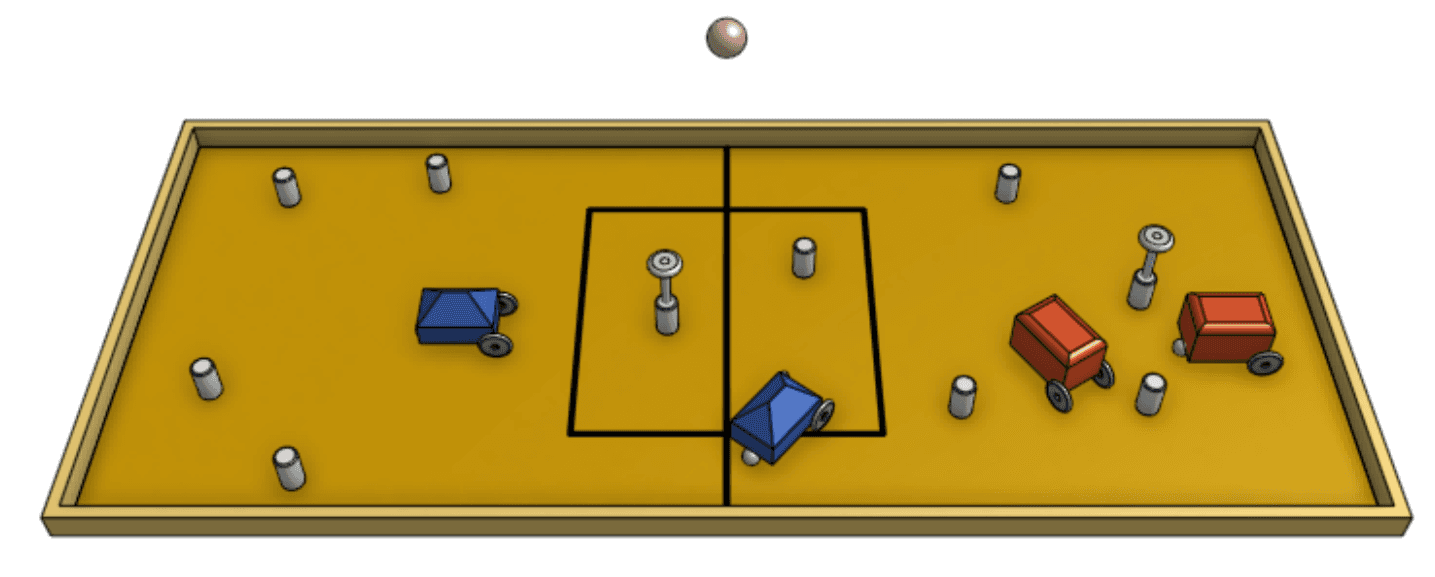
GTA is a play on the game; capture the flag, where 2 teams of 2 (2v2) compete to capture and push beacons into a goal to score points.
Robots are to use a mixture of beacon detection, localization via HTC Vive lighthouse and obstacle avoidance to navigate autonomously.
GTA is a play on the game; capture the flag, where 2 teams of 2 (2v2) compete to capture and push beacons into a goal to score points.
Robots are to use a mixture of beacon detection, localization via HTC Vive lighthouse and obstacle avoidance to navigate autonomously.
GTA is a play on the game; capture the flag, where 2 teams of 2 (2v2) compete to capture and push beacons into a goal to score points.
Robots are to use a mixture of beacon detection, localization via HTC Vive lighthouse and obstacle avoidance to navigate autonomously.
PROTOTYPE 1
WALLFOLLOWING
Wall following was achieved using a series of distance sensors (3 ultrasonic, 1 LiDAR ToF). I wrote the obstacle avoidance code to make use of the mecanum wheels for wallfollowing.
